
Context
Analogies of objects
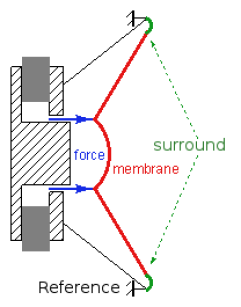
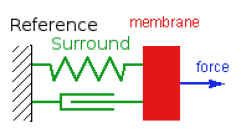
Lots of mechanical systems can be approximated by a finite number of discrete mechanical elements.
By separating the main mechanical phenomena, it is thereby possible to represent them by perfect masses, springs and dampers.
The examples that illustrate this lecture are limited to translational movements, but the same approach will work for multiple translations and rotations.




